De quoi est composé le robot ?
De quoi est composé le robot mBot2 ?
Ma progression
le mBot2
les composants
actionneurs
bilan
Clique sur une étape pour marquer ta progression
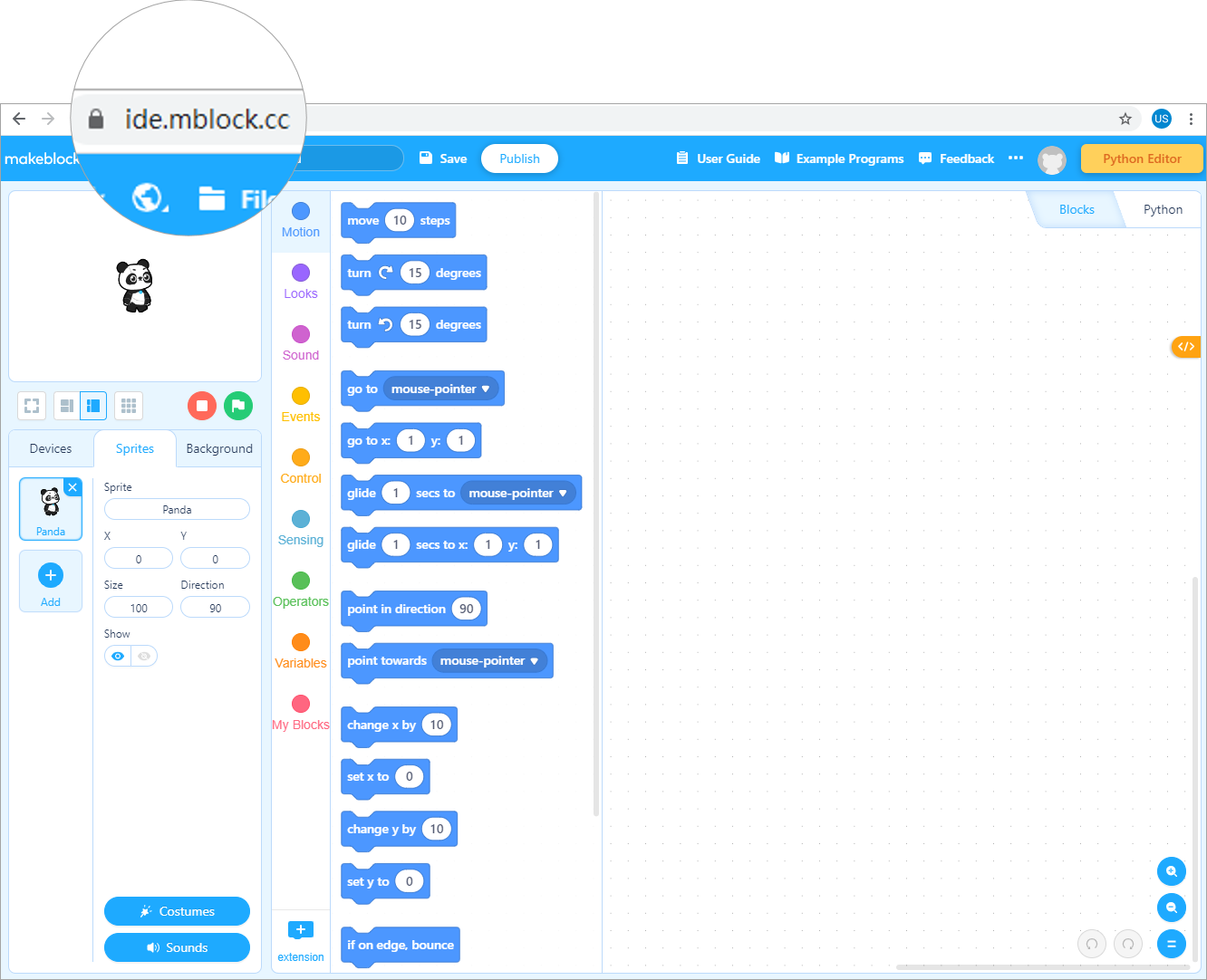
Présentation du mBot2
Les composants du mBot2


Capteur ultrason
Capteur de ligne
Moteurs
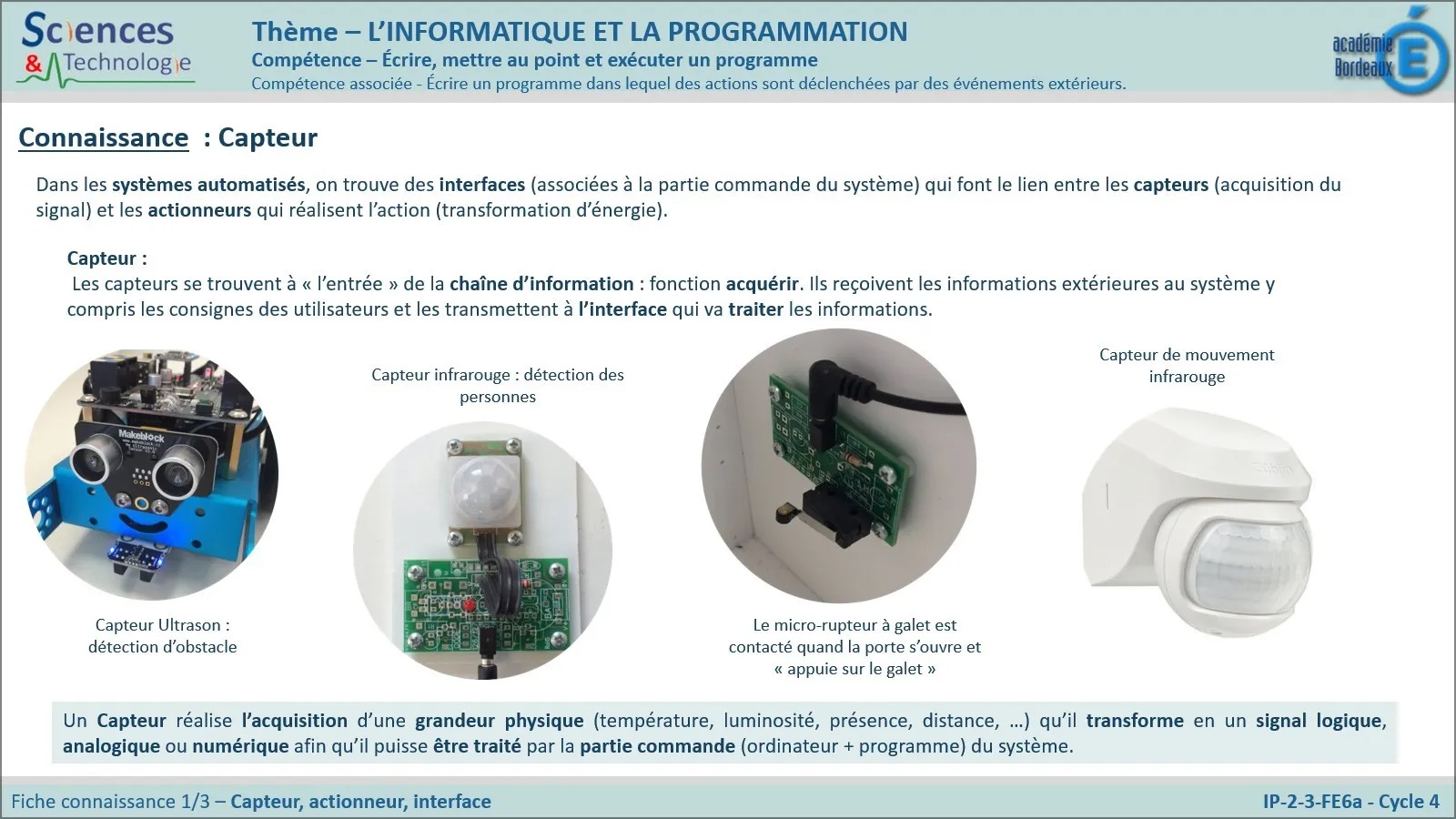
📖 Lexique
| 🔌 Capteur | Composant qui recoit une information de l'environnement (lumiere, distance, couleur...) et la transmet a la partie commande. C'est une entree d'information. |
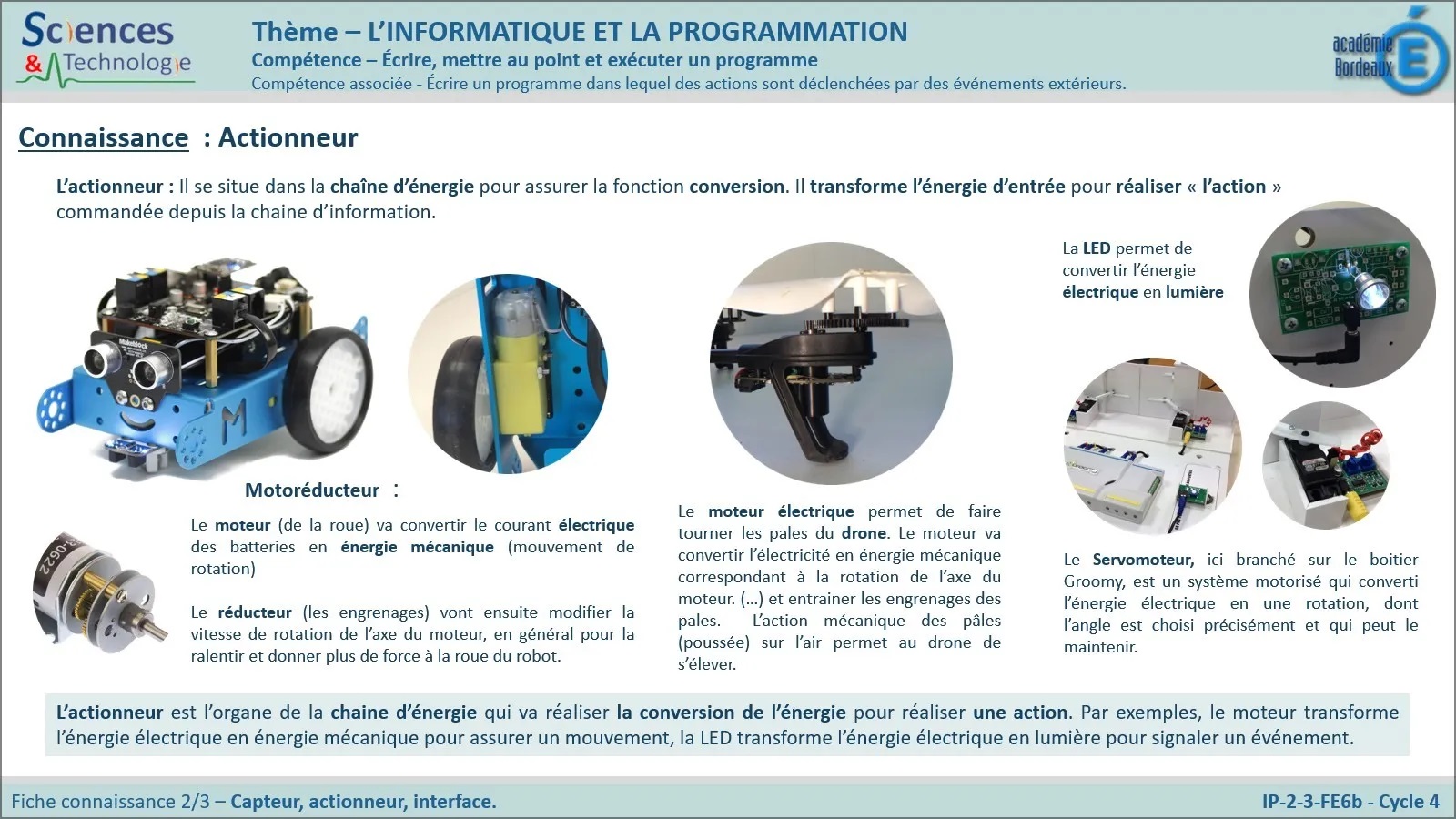
| ⚙ Actionneur | Composant qui agit sur l'environnement (moteur, LED, buzzer...) selon les ordres de la partie commande. C'est une sortie d'information. |
| 🤖 CyberPi | La carte electronique qui constitue la partie commande du mBot2. Elle recoit les informations des capteurs, les traite et envoie des ordres aux actionneurs. |
| 💻 Interface | Element qui permet a l'utilisateur de communiquer avec le robot (ecran, boutons, logiciel mBlock). |
Partie Commande & Partie Opérative
Tout système technique est composé de deux grandes parties qui communiquent entre elles :
|
🧠 Partie Commande (PC)
C'est le "cerveau" du système. Elle reçoit les informations, les traite et envoie des ordres. Sur le mBot2 : la carte CyberPi 💡 C'est aussi une interface : elle possède un écran, des boutons et se connecte via mBlock. |
⚙ Partie Opérative (PO)
C'est le "corps" du système. Elle exécute les ordres et agit sur l'environnement. Sur le mBot2 : les moteurs, les capteurs, les LED, le buzzer... 💡 La PO contient les capteurs (entrees) et les actionneurs (sorties). |
Utilisateur → [mBlock / Boutons] → CYBERPI (PC) → [Moteurs / LED / Buzzer] (PO) → Action
Capteurs & Actionneurs du mBot2
|
🔌 CAPTEURS — Entrees
|
⚙ ACTIONNEURS — Sorties
|
Travail à faire
 |
|
Fiche travail 📄 PDF 📝 Word |
Fiches de connaissance
Clique sur une fiche pour l'agrandir.
Capteurs & actionneurs (1) |
Capteurs & actionneurs (2) |

Schéma de structure |
🧪 Quiz — Vérifie ce que tu as compris
J'ai réussi mon travail si…
 |
|
Compétences — Programme CSP 2025 (4e — rentrée 2025-2026)
| ⚙ Structure, fonctionnement, comportement — Identifier les constituants d'un système technique et leurs relations : capteurs, actionneurs, interface, partie commande, partie opérative |
| 🤖 Chaîne d'information — Identifier les éléments qui permettent d'acquérir, de traiter et de transmettre l'information dans un système technique |
| 💻 Interface utilisateur — Comprendre le rôle de l'interface entre l'utilisateur et le système technique. Distinguer partie commande et partie opérative. |